Compliant materials and slender structures are susceptible to a variety of different instabilities under external stimulus or loading. Traditionally, these instabilities are avoided and classified as failure modes. In recent years, researchers at the BCI have instead attempted to use complex nonlinear behaviour for novel functionality. Simply put, if nonlinearities are understood, then they can be exploited to create well-behaved nonlinear structures. In a recent publication in Physical Review B [1], we employed ‘active modal nudging’ as a novel actuation mechanism for soft robots. In essence, we programmed a soft metamaterial to shape-shift in a rapid and energetically efficient manner by employing embedded actuation to switch between different stable post-buckled modes.
Our work focused on a latticed metamaterial consisting of an elastomeric matrix with a 3 by 3 square array of circular holes, as shown in Figure 1. We discovered that this metamaterial has three stable post-buckling modes under pure compression, i.e. two sheared modes (sheared left and sheared right) and one symmetric polarised mode. The metamaterial was programmed to favour one of the sheared modes under axial compression via modal nudging [2]. An actuator was then embedded within the central hole to trigger a mode switch between the favoured sheared mode and the polarised mode. We demonstrated that this combination of active and passive nudging is more energetically efficient and requires smaller actuation force than the more widely used global actuation method, as shown in Figure 1(a). By toggling the metamaterial between the sheared and polarised state, we were able to make the metamaterial crawl. The effective locomotion could be employed in soft robotics systems (Figure 2).
While in this study, we consider a specific type of soft metamaterial and a specific application, the design paradigm introduced can be extended to other scenarios where energetically efficient shape shifting may be beneficial, such as lightweight adaptive wing structures or adaptive façade and ventilation systems for net-zero buildings.
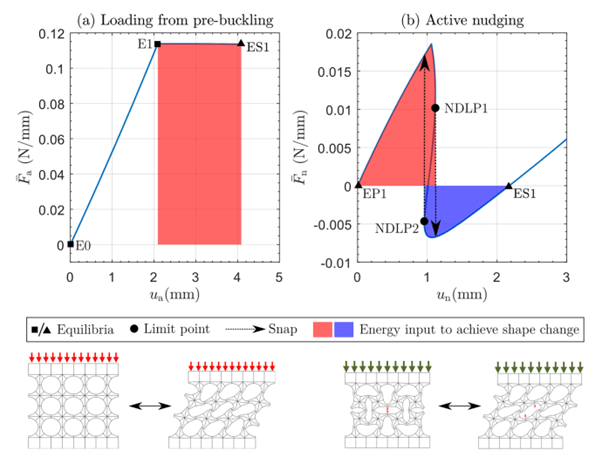
Figure 1 The actuation force–displacement curve of the lattice metamaterial to achieve a us/L = 0.20 shear displacement amplitude, using: (a) increasing compression from the pre-buckling state; and (b) active nudging from the symmetric deformation mode.
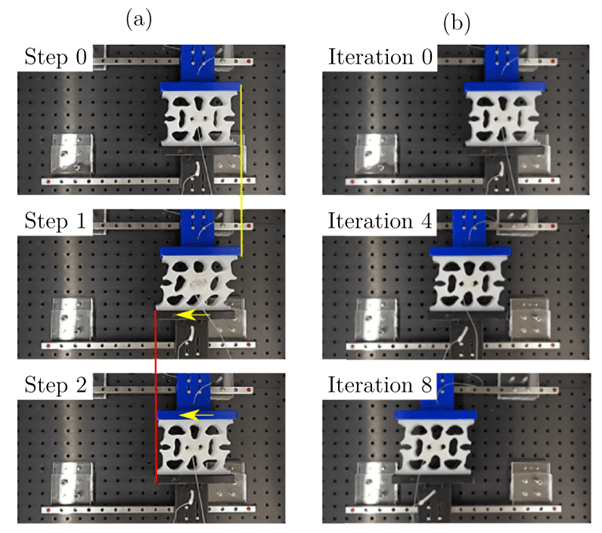
Figure 2 (a) A typical actuation cycle for the robot. Yellow and red lines are the reference line indicating the initial and final positions of the right and left edges. The yellow arrows represent the motion of the fixture within the step. (b) The location of the crawling robot in the initial state, after four and eight iterations. A movie of the movement of the demo robot can be found in https://journals.aps.org/prb/supplemental/10.1103/PhysRevB.107.214103/DemoCrawlingRobot.mp4
References:
[1] Shen, J., Garrad, M., Zhang, Q., Leao, O., Pirrera, A., & R. M. J. (2023). Active reconfiguration of multistable metamaterials for linear locomotion. Physical Review B, 107(21), 214103.
[2] Cox, B. S., Groh, R. M. J., Avitabile, D., & Pirrera, A. (2018). Modal nudging in nonlinear elasticity: tailoring the elastic post-buckling behaviour of engineering structures. Journal of the Mechanics and Physics of Solids, 116, 135-149.